
📖 About me
Yan Huang received his B.S. degree in Electronic Information Engineering from Wuhan University in 2024. He is currently pursuing his M.S. degree in Data Science and Information Technology at the Smart Sensing and Robotics group (SSR Group) at Tsinghua University. His research focuses on robot manipulation and embodied AI, under the guidance of Professor Wenbo Ding in the SSR Group. He is also interning at X2Robot, where he works on vision-language-action (VLA) models for robotics.
📝 Research Interests
Yan Huang’s academic and research endeavors are centered around the cutting-edge domains of:
- Manipulation
- Embodied AI
Feel free to reach out for collaboration or discussions about research ideas.
Email: huang-y24@mails.tsinghua.edu.cn
🔥 News
[2025/11] Huang Yan was awarded the First-Class Scholarship at Tsinghua University.
[2025/10] Huang Yan was selected as an Outstanding Speaker in the AI for Robotics sub-forum of Peking University Greater Bay Area Doctoral Forum!
[2025/10] Huang Yan was invited to participate in the Peking University Greater Bay Area Doctoral Forum!
[2025/10] Huang Yan had one paper published in Nature Sensors!
[2025/06] Huang Yan had two papers accepted by IROS 2025 (International Conference on Intelligent Robots and Systems)!
[2025/01] Huang Yan’s project ALARMbot featured on arXiv!
[2024/03] Huang Yan had one paper published as Front Cover in Journal of Field Robotics (JFR)!
[2024/12] Huang Yan had two papers accepted by ICRA 2025 (International Conference on Robotics and Automation)!
📝 Publications
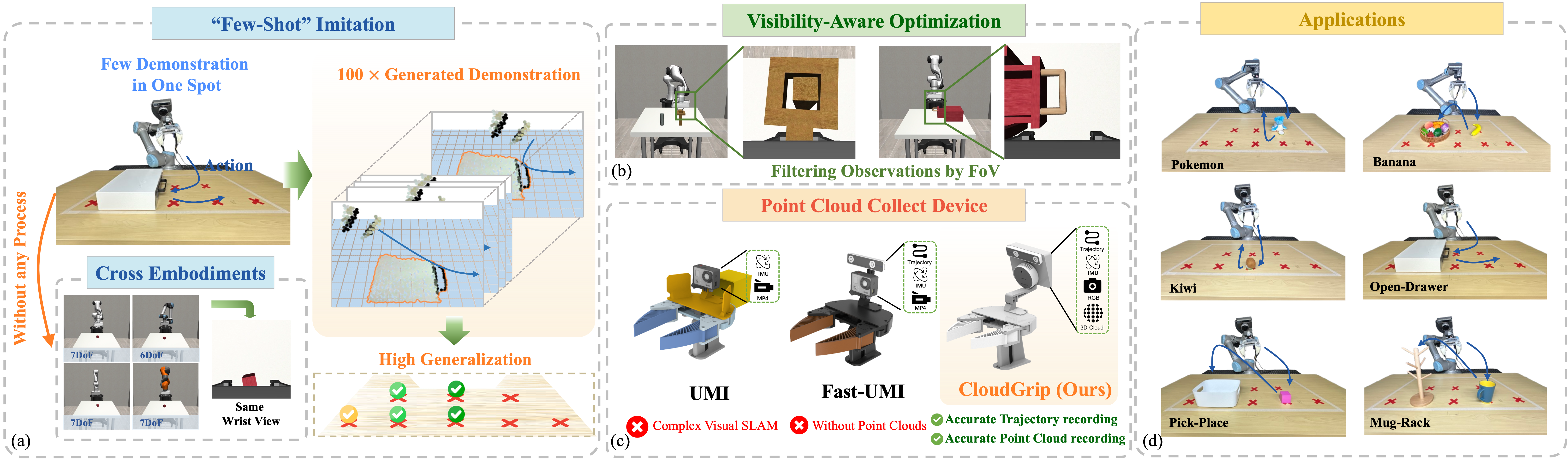
- UMIGen: A Unified Framework for Egocentric Point Cloud Generation and Cross-Embodiment Robotic Imitation Learning
- Yan Huang*, Shoujie Li*, Xingting Li, Wenbo Ding†.
- Arxiv
- Link
- SimLiquid: A Simulation-Based Liquid Perception Pipeline for Robot Liquid Manipulation
- Yan Huang*, Jiawei Zhang*, Ran Yu, Shoujie Li†, Wenbo Ding†.
- Journal of Field Robotics (Front Cover)
- Link
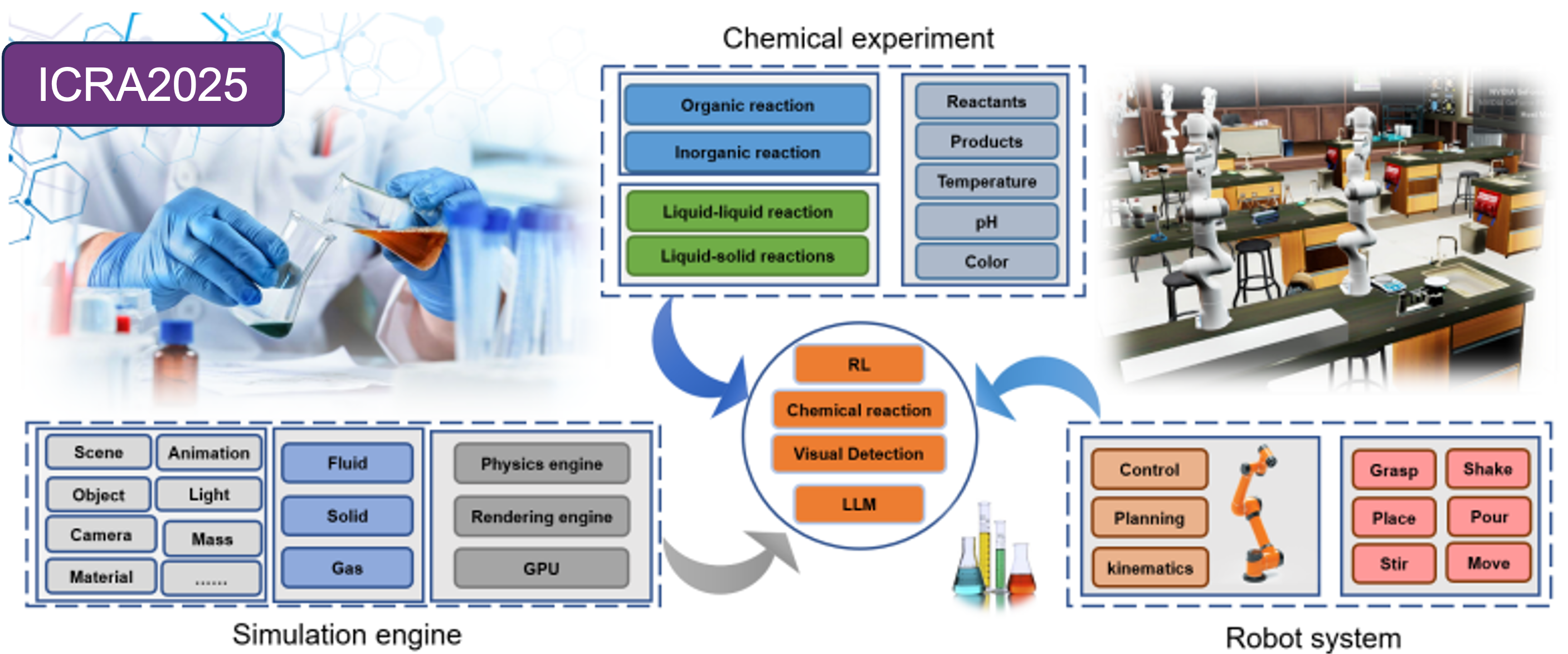
- Chemistry3D: Robotic Interaction Toolkit for Chemistry Experiments
- Shoujie Li*, Yan Huang*, Changqing Guo*, Tong Wu, Jiawei Zhang, Linrui Zhang, Wenbo Ding†.
- 2025 IEEE International Conference on Robotics and Automation (ICRA), Atlanta, USA
- Link

- AirTouch: A Low-Cost Versatile Visuotactile Feedback System for Enhanced Robotic Teleoperation
- Shoujie Li*, Xingting Li*, Yan Huang*, Ken Jiankun Zheng, Ran Yu, Xueqian Wang, Wenbo Ding†.
- 2025 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Hangzhou, China
- Link
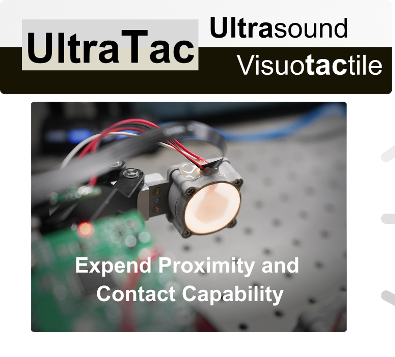
- UltraTac: Integrated Ultrasound-Augmented Visuotactile Sensor for Enhanced Robotic Perception
- Junhao Gong*, KIT-WA SOU*, Shoujie Li*, Changqing Guo, Yan Huang, Chuqiao Lyu, Ziwu Song, Wenbo Ding†.
- 2025 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Hangzhou, China
- Link
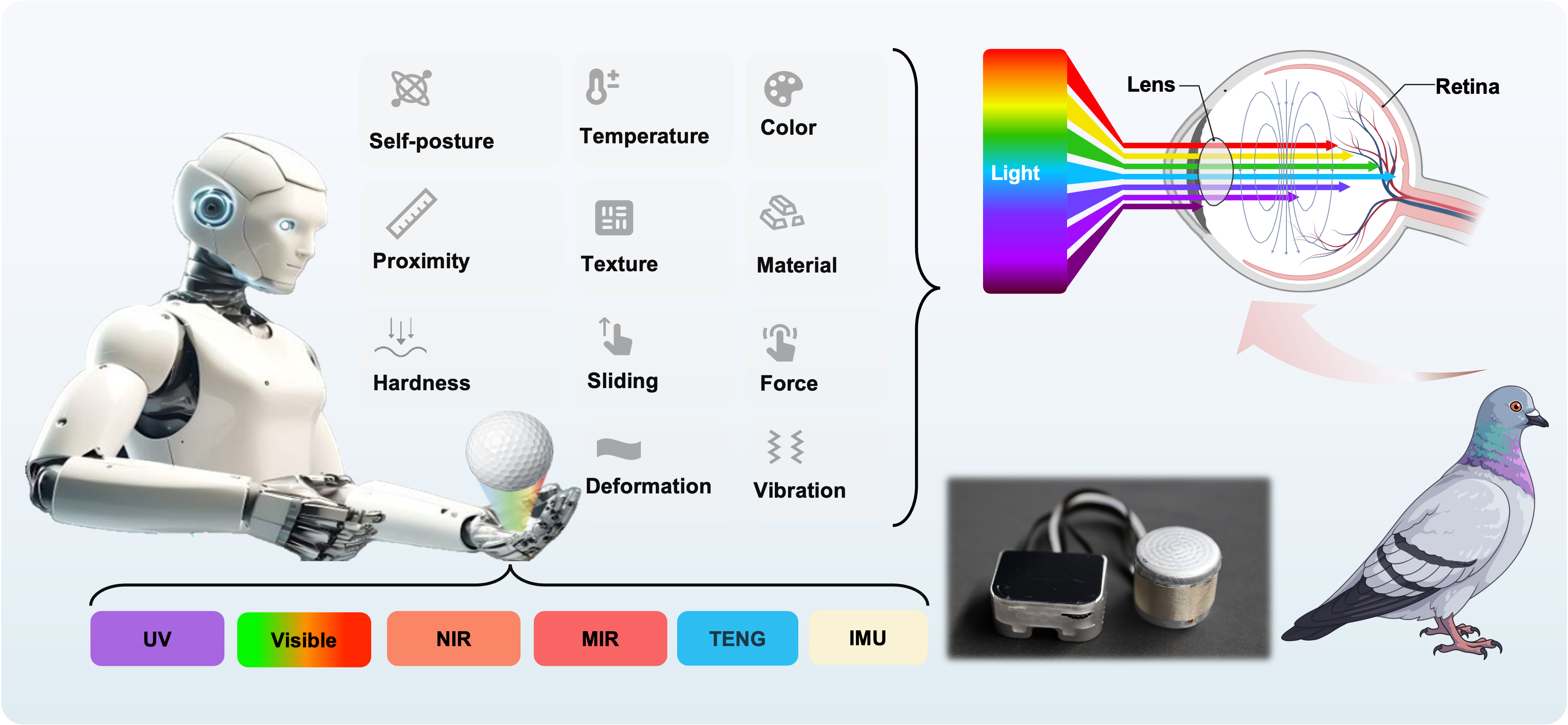
- Pigeon-eye-inspired Multimodal High-resolution Tactile Sensor for Advanced Robotic Interaction
- Shoujie Li*, Tong Wu*, Jianle Xu*, Yan Huang, Zongwen Zhang, Hongfa Zhao, Qinghao Xu, Zihan Wang, Linqi Ye, Yang Yang, Chuqiao Lyu, Shilong Mu, Xueqian Wang, Zhaoqian Xie, Changsheng Wu, Xinge Yu, Wenbo Ding†.
- Nature Sensors
- Link
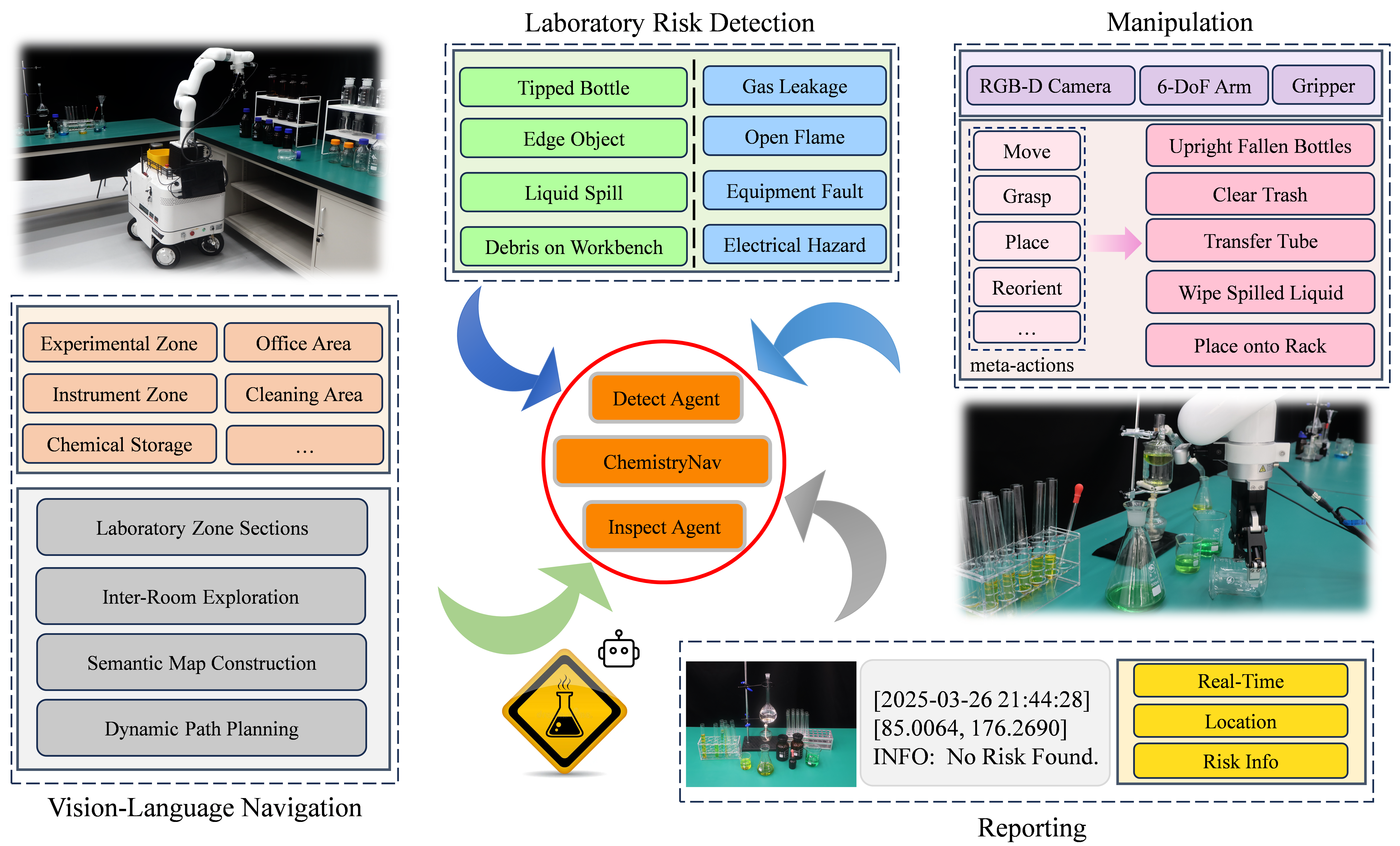
- ALARMbot: Autonomous Laboratory Safety Inspection and Operable Hazard Intervention Robot Enabled by Foundation Models
- Shoujie Li*, Yushan Liu*, Xintao Chao*, Yan Huang, Xiao-Ping Zhang, Wenbo Ding†.
- Project
- Link
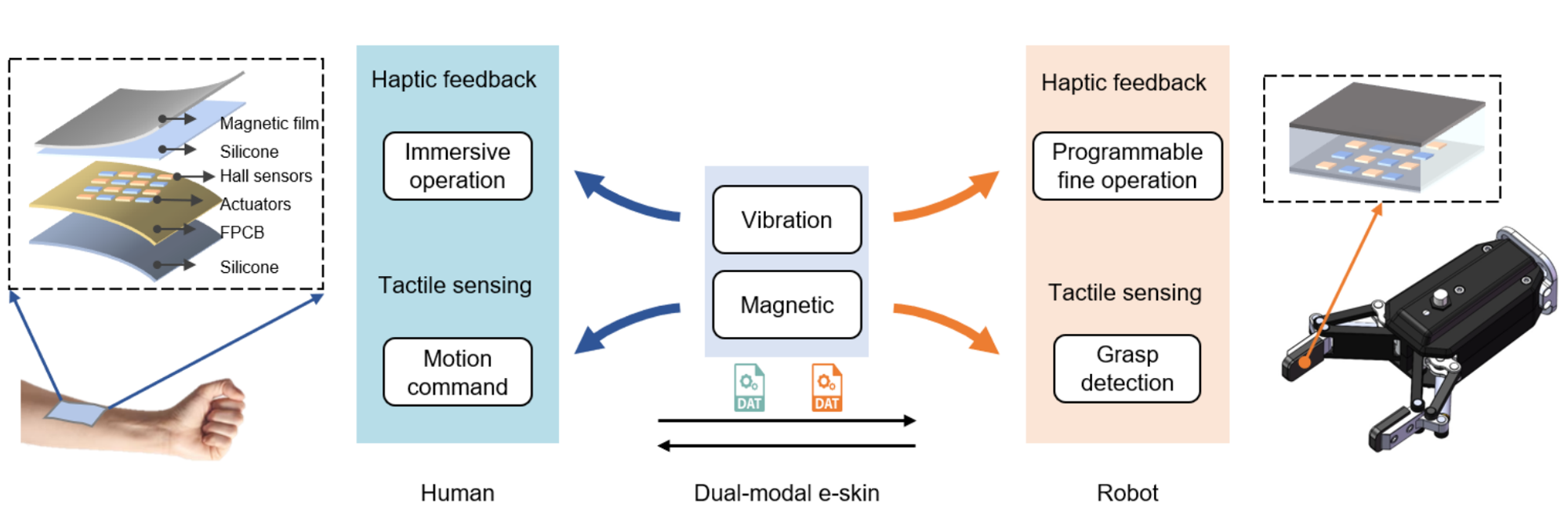
- Dual-modal Tactile E-skin: Enabling Bidirectional Human-Robot Interaction via Integrated Tactile Perception and Feedback
- Shilong Mu*, Runze Zhao*, Zenan Lin, Yan Huang, Shoujie Li, Chenchang Li, Xiao-Ping Zhang, Wenbo Ding†.
- ICRA 2024, Yokohama, Japan
- Link | PDF | Project page
- Depth Restoration of Hand-Held Transparent Objects for Human-to-Robot Handover
- Ran Yu*, Haixin Yu*, Shoujie Li*, Yan Huang, Ziwu Song, Wenbo Ding†.
- 2025 IEEE International Conference on Robotics and Automation (ICRA), Atlanta, USA
- Link